



Generera radarmål i realtid
Eftersom radarsystem förväntas ha extremt god tillförlitlighet. Att kunna testa och mäta på dessa system är därför mycket viktigt. För att testa hela radarsystemet, hela vägen från antenn, sändare och mottagare ner till signalbehandlingen finns olika tekniska lösningar. Artikeln förklarat de viktigaste ekonomiska och tekniska aspekterna på dessa.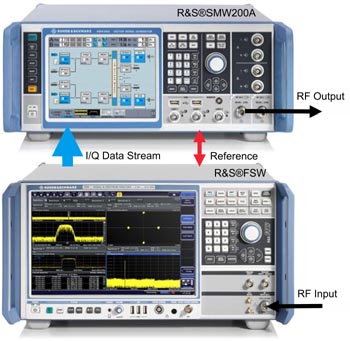
Radarsystem används inom många industrier och i en mångfald av applikationer, inklusive kommersiella, industriella och militära områden. Användningen av radarteknik omfattar allt från fordonsapplikationer för att undvika kollisioner, väderradar, radar inom trafikledning för flyget (ATC – Air Traffic Control) och försvarsapplikationer som radarsystem för tidiga varningar och radar som spårar missiler. Det är det slutliga användningsområdet för applikationen som bestämmer dess fysiska storlek, vilket frekvensområde som används, vågform, sändareffekt, antenndiagram och många andra unika parametrar. Varje parameter och komponent måste testas för att säkerställa korrekt funktion.
Tidskrävande fälttester
De som använder radarsystem är intresserade av funktionstester, nämligen förmågan att detektera och följa ett mål. För att funktionella tester behöver man generera mål över hela dess definierade område, dess definierade radiella hastighetsområde samt azimut- och elevationstäckning med olika reflektionstvärsnitt (RCS – Radar Cross Sections) för att säkra acceptabel noggrannhet och upplösning, detektions- och falsklarmsfrekvens hos radarsystemet.
Fälttester kan vara extremt tidskrävande, komplexa och dyra och kan innehålla upprepbara tillstånd som kan vara svåra att konfigurera. Till exempel kan en flygradar på ett jaktflygplan testas i ett övningsområde under kontrollerade förhållanden, där artificiella mål placeras ut och sedan detekteras och spåras av radarn. Därefter jämför man de värden man fått för målet via GPS och jämför med de data som man samlat in med hjälp av radarsystemet för att bedöma radarns prestanda.
Generera radarmål
Eftersom kostnaden för fälttester kan vara något hindrande om det skall göras regelbundet medan ett radarsystem är under utveckling så är ett alternativ att sätta upp verkliga radartestsimuleringar som innehåller många olika typer av mål och scenarion. Genereringen av radarmål gör det möjligt att totalt testa radarsystemet alla funktioner, inklusive RF-delen, utan att man får samma kostnader som för fälttesterna.
De generatorer för radarmål som finns skapar mål med en bestämd tidfördröjning, definierat Dopplerfrekvensskift och dämpning.
Det finns olika tekniska implementeringar av generatorer för radarmål så som koaxiala fördröjningsledningar (CDL – Coaxial Delay Line), fiberoptiska fördröjningsledningar (FODL – Fiber Optic Delay Line) och digitala radiofrekvensminnen (DRFM – Digital Radio Frequency Memory). Idag finns det också färdiga kommersiella (COTS – Commercial Off-The-Shelf) testsystem som kan användas.
Prestanda och duglighet hos generatorer för radarmål och deras användbarhet när det gäller att testa radarsystem är nyckelfrågan och den är beroende av flera tekniska parametrar. Den här artikeln förklarar arkitekturen hos olika typer av radarmålgeneratorer, förklarar prestandabehov och designkriterier som gör en målgenerator rimlig för radartester och visar också exempel på mätresultat.
Radartester
Där är åtskilliga olika mätuppgifter som måste utföras innan ett radarsystem tas i bruk och lämnas över till en operatör. Under forsknings- och utvecklingsfasen gör man främst tester och mätningar på hårdvarukomponenter. Merparten av dessa avser sändaren och mottagaren och omfattar endast delvis signalbehandlingen eller systemets funktionalitet.
Test- och mätindustrin erbjuder olika typer av testutrustning för radar. Dessa testutrustningar fokuserar framför allt på fysiska egenskaper hos radarutrustningen och kan mäta spektrala egenskaper, sändareffekt eller känslighet under utveckling och produktion. Det medför att radarn blir ofullständigt testad och att viktig funktionalitet som signaldetektering aldrig testas komplett i ett slutet system.
För att testa det kompletta radarsystemet (både basband och radio) och för att säkerställa att alla delar fungerar i enlighet med specifikationerna och uppfyller kundkrav, måste många fler tester genomföras vilket illustreras i fig 1, nedan.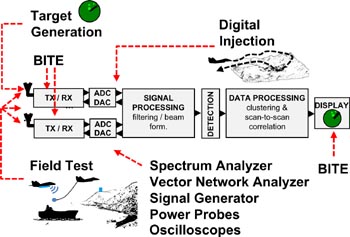
Fig 1. Radartester utförda på ett komplext radarsystem.
Rent fysikaliska prestandamätningar måste kompletteras med ytterligare tester och övervakning av funktionerna. Till exempel övervakar inbyggda testsystem (BITE – Built In Test Equipment) vissa hårdvarukomponenter och funktioner. Men medan BITE kan ge PASS- och FAIL-indikering på radarns status är funktionen inte nödvändigtvis konstruerad för att ge information om radarns prestanda. Om radarn inte detekterar ett mål, hur vet då operatören om radarn fungerar som den skall?
Därför kan man utföra fälttester med bogserade mål för att sätta ett normalvärde på radarns prestanda och testa hela radarsystemet inklusive processorkedjan, men inte hur duglig processorn är. Vissa radarsystem har en möjlighet att lägga in digitala signaler, så att olika scenarion kan läggas in i radarprocessorn. Medan ett fälttest ger omfattande information om radarns prestanda och funktion i förhållande till dess specifikation, ger tester där man lägger in digitala signaler information om egenskaperna hos radarns processor.
Som nämnts tidigare är fälttester dyra och är knappt repeterbara och har begränsad tillgång när det gäller vissa typer av mål. Av dessa skäl använder man radarmålgeneratorer för att ersätta vissa fälttester och dessutom ge repeterbara tester. De sparar tid och pengar och man kan testa hela processkedjan genom att lägga in radarmål.
De tekniska kraven på generatorer för det målgenererande systemet är en utmaning när det gäller den grundläggande arkitekturen. Det finns ekonomiska fördelar som tenderar att gynna system för laboratorietest gentemot fälttester. Men man måste ändå göra funktionella tester av ett radarsystem genom rätt blandning av laboratorietester och fälttester. Dessutom, eftersom man nu lägger in elektroniska skydd (EP – Electronic Protection) i sina konstruktioner, kan dessa nya systemkrav kräva helt nya testmetoder.
Generatorer för radarmål
Generatorer för radarmål använder sig av tidsfördröjning (räckvidd), Dopplerfrekvensskift (radiell hastighet) och dämpning för en radarsignal. Den verkliga radarsignalen tas emot, manipuleras och sänds tillbaka. Andra system har en vågform lagrad som spelas upp när systemet får en triggsignal. De olika typerna av generatorer för radarmål har väldigt olika prestanda och testar olika nivåer av funktionalitet. Somliga kan bara generera ett enda mål för ett väldigt specifikt radarsystem och bara inom ett enda frekvensband, medan andra täcker ett brett frekvensspektrum och kan erbjuda simuleringar av komplexa målscenarion. Det finns också generatorer för radarmål inom dedicerade frekvensband, till exempel för testning av sensorer för fordonsradar [8].
Prestanda och duglighet hos generatorer för radarmål och deras förmåga att testa ett radarsystem beror av ett flertal ekonomiska och tekniska parametrar. Förutom effektivitet och kostnad så finns följande tekniska parametrar att ta hänsyn till:
* Systemarkitektur
* Frekvensområde och bandbredd
* Fasbrusprestanda, signaldistorsion, oönskad utstrålning och den övergripande kvaliteten hos ekosignalen
* Digitaliseringsprestanda, samplingsfrekvens och antalet effektiva bitar i kvantiseringen
* Maximalt Dopplefrekvensskift, Dopplersteg
* Maximalt avstånd, minsta avstånd, stegning
* Triggning och / eller kontinuerlig drift
* Flexibiliteten att reproducera autentiska miljöscenarion och möjliga tester som kan vara intressanta att göra
Arbetsfrekvenserna för radarsystem varierar över ett väldigt brett spektrum av frekvensband. Från övervakningsradar för långdistans som arbetar i HF-området eller i L-band, ATC-radar i S-band, marin övervakningsradar i X-band upp till sensorer för fordonsradar i K- och W-band. Därför skall generatorer för radarmål täcka ett stort frekvensområde.
Bandbredden bestämmer upplösningen för avstånd och gör det möjligt att använda radar med varierande frekvens. Större bandbredd ger inte bara högre upplösning för avstånd; radarsystem med varierande frekvens behöver också stor bandbredd. Därför måste bandbredden hos målgeneratorn täcka åtminstone den bandbredd som krävs för att noggrant återskapa vågformen.
Fasbrusprestanda och naturtrogen återgivning av signaler är väldigt viktigt eftersom dålig prestanda eller dålig återgivning av signaler ger distorsion eller förhöjt fasbrus på den återutsända signalen. Till exempel kan radarn endast detektera mål som rör sig långsamt om man har bra fasprestanda. Om målgeneratorn har högt fasbrus som läggs till signalen så kan målgeneratorn begränsa möjligheten att testa radarns verkliga prestanda.
För att simulera fördröjning och Dopplereffekt så krävs digitalisering i de flesta moderna målgeneratorer. Radarsignalen tas emot, digitaliseras, manipuleras, omvandlas till analog igen och sänds dämpad tillbaka. Det effektiva antalet bitar (ENOB – Effective Number Of Bits) och dynamiskt område utan oönskade signaler (SFDR – Spurious Free Dynamic Range) är parametrar som används för att kvantifiera kvalitén hos en analog/digitalomvandlare, vilket är viktigt för att återge den inkommande radarsignalen och återskapa den ekade radarsignalen.
De andra tekniska parametrarna som största och minsta avstånd eller Dopplerfrekvensskift, antalet mål eller testscenarion, beror i huvudsak på prestanda hos signalprocessorn, arkitekturen och processorprestanda i basbandet på radarmålgeneratorn.
Idag använder radaringenjörer olika typer av generatorer för radarmål.
1) Fiberoptiska fördröjningsledningar
Målgeneratorer som använder FODL (FODL – Fiber Optical Delay Lines)har använts under flera decennier för test och mätning av radarsystem – till exempel för att mäta fasbrus hos radarsystem och för att simulera repeterbara signaler för att testa räckvidd utomhus för radio- och radarsystem. Dessa relativt flexibla, faskoherenta och små system omvandlar RF-signalen från radarn till en optisk signal och fördröjer denna med hjälp av en fiberoptisk ledning av bestämd längd innan signalen åter omvandlas till en RF-signal och sänds tillbaka till radarn. Vissa system kan också lägga till ett Dopplerfrekvensskift vilket visas i Fig 2.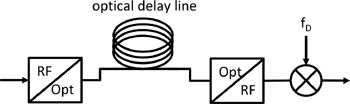
Fig 2. Förenklat blockdiagram för en fiberoptisk fördröjningsledning (FODL).
Fashastigheten hos en optisk signal som går i en fiber är ungefär 5 µs/km, medan dämpningen är i storleksordningen 0,5 dB/km. Därför kan man få en väldigt fin upplösning när det gäller området – i storleksordning av ps.
Bandbredden hos en fiberoptisk fördröjningsledning är mycket stor. Den begränsas i huvudsak av den modala dispersionen för flermods fibrer och är i storleksordningen GHz/km. För enkelmods fiber begränsas modulationsbandbredden av materialdispersionen och kan bli 100 GHz/km för en våglängd med väldigt låg dispersion [1]. Det dynamiska området begränsas av kvantbruset vid låg RF-nivå och av ickelinjära processer vid hög RF-nivå [3] och avtar linjärt med ökad signalbandbredd [1]. Så fort man lägger till Dopplerfrekvens, beror det dynamiska området utan oönskade signaler på ytterligare parametrar och reduceras ofta dussintals dB. Även om RF-signalen kan moduleras med ett Dopplerfrekvensskift så är längden på fibern konstant och man kan inte på ett realistiskt sätt generera ett rörligt mål.
FODL har många fördelar. FODL har konstant fördröjning gentemot frekvens, är okänsligt för vibration, är väldigt okänsligt för elektromagnetiska störningar och fiberfördröjningar strålar inte ut någon energi. Även repeterbarheten av simuleringen, den låga kostnaden för systemet och tidsbesparingar är viktiga fördelar. Tester där det är nödvändigt med utomordentliga fasbrusegenskaper nära bärvågen, till exempel test av undertryckande av fasta mål (FTS – Fixed Target Suppression), går mycket bra att göra. Emellertid kan FODL inte generera tidsvarierande avstånd för Dopplermål, kontinuerligt varierbara avstånd eller godtycklig dämpning eller förstärkning av signalen.
2) Digitalt radiofrekvensminne
DRFM (DRFM – Digital Radio Frequency Memory)kan användas för simulering av radarmål för test- och mätändamål. Dessa typer av system manipulerar radarsignalen digitalt. Ett system av DRFM-typ blandar ner, filtrerar och digitaliserar den mottagna RF-signalen. Signalen modifieras och/eller lagras sedan. Den omvandlas tillbaka till analog och blandas slutligen åter upp till RF-frekvens med hjälp av samma lokaloscillator (LO) som användes för nedblandningen. Till sist i processkedjan förstärks signalen och sänds tillbaka. Denna metod visas i fig 3.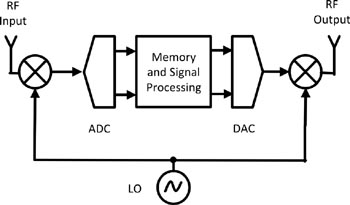
Fig 3. Förenklat blockdiagram för ett DRFM-system.
Ett av de första DRFM-systemen var det flygburna ALQ-165, ett störsändarsystem för egenskydd (ASPJ – Airborne Self Protection Jammer), som ingick i Joint Vision 2010. Utvecklingen startades 1979, men programmet lades ned 1992 [6]. Denna ASPJ täckte frekvensområdet 0,7 till 18 GHz (senare 1 GHz till 35 GHz). Den genomsnittliga kostnaden för en enhet var 1,27 miljoner USD [4].
Den kommersiella och offentliga information som finns om de DRFM-system som är tillgängliga idag visar att dessa kan täcka frekvenser upp till 40 GHz, erbjuda digitalisering upp till 12 bitar med upp till 1,4 GHz momentan bandbredd och upp till -65 dBc SFDR med en minsta fördröjning av 90 ns. Men baserat på tekniska begränsningar så hittar man inte allt detta hos en enskild DRFM-enhet. Till exempel har flertalet bredbandiga DRFM-enheter en kraftigt reducerad signalupplösning och använder betydligt färre än 12 bitar eller så är byggda enbart för forskningsändamål.
Den minsta fördröjning som systemet tillför sätts till största delen av analog/digitalomvandlaren och digital/analogomvandlaren, eftersom det tar några cykler för att omvandla analog signal till digital och tvärt om, den är också beroende av bandbredden och antalet bitar. Dessutom ger signalbehandlingen ett bidrag på ytterligare några cykler för signalbehandlingsprocessen till radarekot. Typiska minsta värden för fördröjning ligger idag på från mindre än 100 ns till mindre än 1 µs.
När det gäller DRFM är det viktigt att veta hur den analoga RF-signalen representeras i den digitala domänen (amplitud, fas, I/Q) och antalet bitar, eftersom detta är det som framför allt avgör hur väl signalen avbildas. En annan viktig punkt när det gäller DRFM är hur stort dynamiskt område utan oönskade signaler (SFDR) man har, eftersom radarn kan försöka urskilja vad som är verkliga mål och vad som är signaler från elektroniska motmedel (ECM – Electronic CounterMeasure). SFDR begränsas av effektivt antal bitar (ENOB), olinjäritet hos komponenter och brus.
Medan DRFM-system med naturtrogen återgivning av signalen med koherent måleko som skickas tillbaka kan vara lämpliga för radartester, så kan användningen av en DRFM med ett användargränssnitt för att testa en stor variation av signal förhållanden och scenarion vara begränsad. Denna väldigt specialiserade utrustning levereras till ett visst pris och kanske med begränsad flexibilitet för att grundligt testa de funktionella egenskaperna hos en radar. Specifikationer över tekniska prestanda och exakt pris för en DRFM går knappt att uppbringa på den kommersiella marknaden. Enligt USAs försvarsdepartement (DoD – Department of Defense), ligger kostnaden för en enda DRFM modul i storleksordningen 150 000 USD till 700 000 USD, beroende på vad den har för egenskaper [5].
3) Kommersiell test- och mätutrustning
Kommersiella lösningar som finns färdiga ”på hyllan” (COTS – Commercial Off The Shelf) när det gäller test- och mätutrustning är idag också användbara för att generera radarmål, i huvudsak på liknande sätt som en DRFM gör, genom att blanda ner RF-signalen, göra digital manipulation i basbandet och sedan blanda upp signalen igen.
Radarmålgeneratorn består av en mottagare (en RF signalanalysator) och en sändare (en RF signalgenerator) där man använder sig av vanlig COTS test- och mätutrustning, som normalt används som fristående utrustning för att analysera eller generera RF-signaler. När de används tillsammans kan dessa två instrument fungera som en generator för radarmål.
Ett sådant COTS system kan användas inom området 100 kHz till 40 GHz och ta emot godtycklig RF radarsignal inom detta frekvensområde och med en bandbredd av upp till 160 MHz och omvandlar signalen till I/Q data (In-phase och Quadrature-phase ). I/Q-data förs över till basbandet på signalgeneratorn där tidsfördröjning, Dopplerfrekvensskift och dämpning läggs till i enlighet med användarens specifikationer. Radarekosignalen återutsänds sedan till radarn från signalgeneratorn. Se fig 4.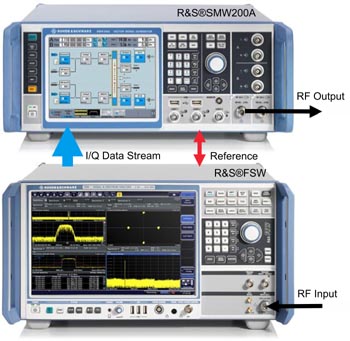
Fig 4. Presentation av en COTS realtids radarmålgenerator (bestående av R&S®SMW200A vektorsignalgenerator och R&S®FSW signal- och spektrumanalysator).
En fördel med denna mätutrustning är dess enastående RF-prestanda, som kan användas för ytterligare prestandatester på radarn under forsknings- och utvecklingsfasen eller vid produktion. Det flexibla och modulära upplägget tillåter att vektorsignalgeneratorn eller signal- och spektrumanalysatorn används antingen i sin dedicerade fältinstallation eller i någon annan helt annan testuppkoppling.
Mätningar
För att demonstrera denna radarmålgenerator används en mjukvarudefinierad radar (SDR Software Defined Radar) och signalbenhandlingen görs med MATLAB. I demosystemet används en vågform med tillräcklig upplösning för att hantera flera mål och prestanda hos denna SDR analyseras med hjälp av den beskrivna COTS radarmålgeneratorn.
Ett ensamt mål genereras av radarmålgeneratorn och observeras med hjälp av SDRen (som fungerar som radar under test). I Fig 5 visas den testade radarns användargränssnitt inklusive spektrum, avstånds- och Dopplerdiagram och mållista. Ett enda lokalt maxima kan observeras, vars effekt är högre än tröskelvärdet för konstant falsklarmsfrekvens (CFAR – Constant False Alarm Rate). Genom att mäta beatfrekvensen (svävningsfrekvensen), bestäms avstånd och radiell hastighet. I radarmålgeneratorn skapas ett avstånd R1 = 2000 m och ett Dopplerfrekvensskift vr1 = –25 m/s. Detta mäts upp väldigt exakt av radarn. Se fig 5.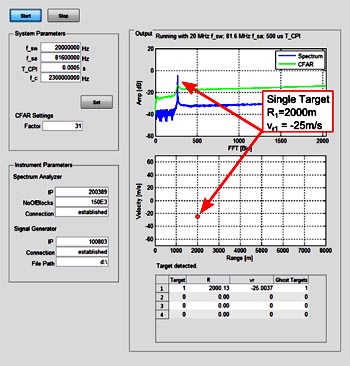
Fig 5. Ensamt mål genererat med COTS radarmålgenerator.
Denna COTS radarmålgenerator har kapacitet att generera upp till 20 olika mål i Dopplerceller med olika avstånd. Signalgeneratorn innehåller också flera RF-generatorer, vilket gör det möjligt att test radarn mot störningar, till exempel samexistens med LTE mobiltelefonisystem eller andra tjänster [2].
Fig 6 visar samma radarmål, men här har en störare lagts till i form av en frekvensmodulerad kontinuerlig RF-signal. Brusgolvet har höjts markant. Det går fortfarande att visuellt observera radarekot, men tröskelvärdet för CFAR är för högt för att målet automatiskt skall detekteras.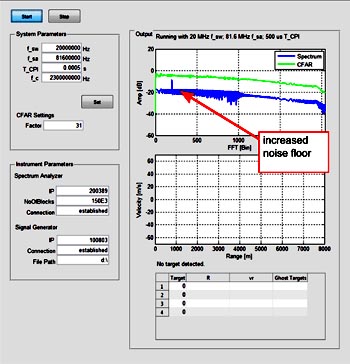
Fig 6. SDR som samexisterar med annan verksamhet.
Förutom att testa hur radarn fungerar funktionellt, kan COTS radarmålgenerator vara en hjälp för att utvärdera moderna elektroniska skyddsåtgärder i radarn. Detta kan vara nödvändigt med tanke på att flera plan i Europa under mitten av 2014 [7] försvann från flygtrafikledningens radarskärmar. Ett exempel kan vara att detektera förekomsten av DRFM, använt som elektroniskt motmedel.
I följande scenario kan en fasmodulerad radarsignal, till exempel en Barkerkod, användas för att testa prestanda för radarns signalbehandling. Barkerkoden sänds ut och fördröjs i radarmålsimulatorn. Vågformen för radarsignalen har en mycket specifik vågform i basbandet och radarmottagaren kan detektera hur naturtroget ekot är och om det är virtuellt eller reellt med hjälp av korrelationsfilter. En okorrelerad signal kan härröra från ett ECM-system på grund av återsampling med annan frekvens, ett litet antal affektiva bitar i analog/digitalomvandlingen, fasbrus eller distorsion i förstärkarna i målsimulatorn. Beroende på den DRFM som används kommer den genererade ekosignalens karaktär troligen att vara annorlunda än för ett verkligt mål. Om signalbehandlingen i radarn är fokuserad på elektroniska motmedel kan den detektera skillnaden om ekot som kommer tillbaka inte är riktigt naturtroget. Denna mätning kan också utföras med den presenterade radarmålgeneratorn.
Fig 7 visar en Barkerkodad radarsignal i början av mätningen och motsvarande uppfångade radarekosignal dämpad ungefär 50 dB både som nivå och som korrelerad nivå. Tids-sidlobmätningarna visar förväntat koherent eko fördröjt 40 µs.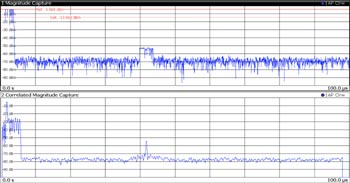
Fig 7. Barkerkod (början), korrelerad amplitud och motsvarande ekosignal (40 µs senare).
I fig 8 ser vi ekosignalen på samma sätt. Men när en annan samplingsfrekvens används (till exempel på grund av bruket av DRFM) kan det i sin tur ge en annan karaktär hos signalen. Korrelationen hos radarekot förändras dramatiskt.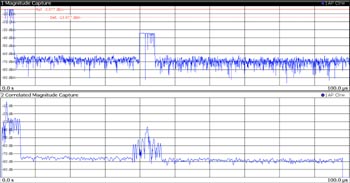
Fig 8. “DRFM version” av samma ekosignal med annan signalåtergivning.
Sammanfattning
Målgeneratorns RF-prestanda måste vara bättre än den radar som testas och den skall kunna konfigureras för en mängd olika scenarion. Med en perfekt prestandabalans kan man flytta många fälttester in i labbet. Det reducerar kostnaderna för mjukvaru- och hårdvarutester.
Fiberoptiska fördröjningsledningar används fortfarande idag för radartester. Men de saknar flexibilitet för mätningarna, till exempel när det gäller att generera avståndsmätningar till rörliga mål.
En DRFM kan däremot hantera detta och ger ytterligare lösningar när det gäller att generera signaler som skall motsvara radarekon. Emellertid är en DRFM en mycket specialiserad utrustning som kan vara mycket dyr och som inte nödvändigtvis är konstruerad som en testutrustning med ett flexibelt gränssnitt.
Som jämförelse är en kommersiell lösning uppbyggd av standardprodukter (en ”COTS” test- och mätutrustning) flexibel och kan användas för en mängd testlösningar, från signal- och komponenttest eller analys till generering av radarmål. Mångsidigheten hos testutrustningen och dess flexibla och modulära upplägg (som gör att det även kan användas som radarmålgenerator) ökar flexibiliteten och effektiviteten för denna utrustning i ett testlaboratorium.
De olika tekniska lösningarna för radarmålgeneratorer har alla sina speciella fördelar, men de bidrar alla till att ersätta fälttester med laboratorietester, gör testningen mindre komplex och reducerar kostnaderna genom att ge hög repeterbarhet och förbättrade möjligheter till automatiska tester.
Referenser
[1] K.P. Jackson et. al., "Optical Fiber Delay-Line Signal Processing", IEEE Transactions on Microwave Theory and Techniques, Vol. MTT-33, No. 3, pp. 193-210, mars 1985
[2] Heuel, S.; Roessler, A., "Co-existence Tests for S-Band Radar and LTE Networks", Microwave Journal – Military Microwaves, augusti 2014.
[3] K. Ogawa, "Considerations for single mode fiber systems", Bell Syst. Tech. J., Vol. 61, pp. 1919-1931, 1982
[4] "AN/ALQ-165 Airborne Self-Protection Jammer (ASPJ)", hämtat från www.dote.osd.mil, oktober 2014
[5] Small Business Innovation Research (SBIR), Navy, Topic N131-006, Acquisition Program, "Direct Digital Radio Frequency (RF) Conversion Digital Radio Frequency Memory (DRFM)", 2013
[6] N. Friedman, "The Naval Institute Guide to World Naval Weapons Systems", 1997-1998
[7] Reuters, "Jets vanishing from Europe radar linked to war games", hämtat från http://www.reuters.com/article/2014/06/13/us-europe-airplanes-safety-idUSKBN0EO1CW20140613, november 2014
[8] "Rohde & Schwarz enables comprehensive automotive radar tests with target simulator and FM CW signal analysis", pressmeddelande hämtat från www.rohde-schwarz.com/ad/press/automotive, oktober 2014
Filed under: Radimat




