



C-V2X-simulatortestning för autonom och kooperativ körning
Autonoma fordon har sett en avsevärd utveckling de senaste åren, med förbättrade sensorer och användningen av artificiell intelligens för beslutsfattning. Pavol Polacek, Wireless Speciality, Anritsu, tittar här på hur man kan komma runt en del av begränsningarna.
Det finns ett antal begränsningar med tekniker för lokal avkänning, t.ex. att det krävs en direkt siktlinje mellan sensorn och det aktuella objektet. Med Cellular V2X (C-V2X) kan man komma till rätta med dessa begränsningar och möjliggöra förbättrat samarbete mellan de olika delarna i transportsystemet. C-V2X kommer spela en viktig roll i övergången till kooperativ körning och smart infrastruktur för transporter. För att effektivt kunna testa C-V2X-integration i labbet håller virtuell körtestning på att bli en nödvändighet, detta pga den stora mängd tester som måste utföras.
Autonom och kooperativ körning
Olika system i fordonen förenklar lokal avkänning och beslutsfattande med hjälp av data som de samlar in om objekt i närheten. Detta begränsas av sensorernas räckvidd, hinder, dåligt väder och okända avsikter hos andra förare.
Integrering av C-V2X (Cellular Vehicle-to-Everything) kommer möjliggöra en övergång från autonom till kooperativ körning. I den första fasen används information från externa källor, via trådlösa kommunikationslänkar, som inte är kritiska för beslutsfattandet. Ytterligare förbättringar kan uppnås genom att dela information mellan fordon och molnbaserade tjänster. Det kan handla om lokala faror, vädret och trafikläget.
C-V2X-teknologi
C-V2X i både direkta och nätverksbaserade moder förser fordonsapplikationer med kommunikationsgränssnitt och förbinder fordon och fotgängare med smarta infrastruktur för transporter.
LTE V2X-gränssnitt möjliggör grundläggande och utökade säkerhetsfunktioner vid höga hastigheter och tätheter, samtidigt som de ger hög datagenomströmning, hög tillförlitlighet, låg latens och möjligheter att dela positioner. 5G NR V2X lägger till stöd för avancerade säkerhetsfunktioner. 5G NR-radio kommer att ge förbättrade prestanda för att kunna erbjuda komplexa kartuppdateringar och delad sensorinformation, ultralåg latens med ”multi-access edge”-bearbetning, ultrahög tillförlitlighet för säkerhetskritiska applikationer samt exakt positionering.
Regionala standarder för C-V2X
Åtskilliga regionala C-V2X-standarder som definierar användningsfall har kommit fram, som exempelvis:
* EU – ETSI EN302 637-2 CAM; ETSI EN302-637-3 DENM
* USA – SAE J2945TM/1 MAR2016
* Kina – T/CSAE 53-2020
Även om de är snarlika finns det skillnader, och vissa av användningsfallen saknar motsvarigheter.
På liknande sätt definierar regionala standarder även meddelandeformat:
* EU – ETSI TS 302 637-2 V1.3.2 (CAM) / ETSI TS 302 637-3 V1.2.2 (DENM)
* USA – SAEJ2735-201603
* Kina – YD/T 3709-2020
För att ge lägesdata till omkringliggande fordon används, beroende på region, Basic Safety Message (BSM) Part 1 eller Co-operative Awareness Message (CAM).
Fördelar med C-V2X
Genom att dela på rådata från sensorer, utöka sensorernas räckvidd eller tydliggöra fordonens avsikter, genom delning av dess kurser, kan C-V2X avhjälpa begränsningar vid lokal avläsning och beslutsfattande, och samtidigt underlätta kooperativ, automatiserad körning.
Fördelarna med C-V2X är dessa:
* Ökar trafiksäkerheten
* Minskar restiderna
* Ökar servicenivån i trafiken
* Minskar bränsleförbrukning och utsläpp
* Förbättrad räckvidd och minskade kostnader för perception
(NOTE: ”Perception” = refers to the vehicle and its sensors, perceiving the surrounding environment)
Användningsfall med C-V2X
Om vi ser närmare på två användningsfall, ett enkelt och ett med en hög grad av samarbete, kan vi se vilka meddelandetyper som utväxlats, hur stor vikt fordonet skall ge till informationen som erhållits via C-V2X och vilka enheter som utväxlar information.
En RSU (Roadside Unit) är en stationär V2X-transceiver vid sidan av vägen som ansluter användare till trafikhanteringssystemet. En OBU (On-Board Unit) är en V2X-transceiver som är monterad i ett fordon eller bärs av en fotgängare.
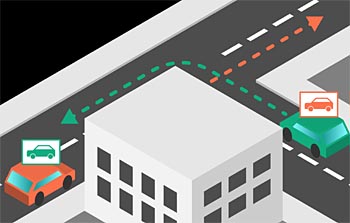
Intersection Collision Warning (ICW)
Med ICW är den utväxlade informationen bara informativ, med varningar för fordon som närmar sig korsningen. Detta ökar uppmärksamheten bortom sensorns räckvidd eller bakom hinder.
Fig 1: ICW-användningsfall där CAM/BSM Part 1-meddelanden utväxlas för att upplysa närbelägna parter om fordonets status.
De meddelanden som används är CAM eller BSM Part 1. Dessa sänds till alla noder i närheten och innehåller identifierare, typ av ITS-station, referensposition, riktning, hastighet m.m. Mottagarna måste utvärdera hur relevant informationen är.
Dynamic Intersection Management (DIM)
DIM är ett komplext användningsfall som omfattar många olika typer av deltagare och meddelanden. I centrum har vi styrenheten för korsningen (Intersection Manager). Den förstår korsningens geometri, bearbetar information från sensorer och mobila deltagaresamt kan ändra trafiksignaleringen. C-V2X har avgörande betydelse för säker samexistens för alla inblandade.

Fig 2: DIM-användningsfall som visar den komplexa samverkan mellan fordon, fotgängare och infrastruktur, allt styrt av en Intersection Manager.
Använda meddelandetyper är BSM, CAM, DENM, Traveller Information Message (TIM), Signal Path and Timing (SPaT)/Map Data (MAP) och Personal Safety Message (PSM).
TIM sänds ut från stationära RSU:er med information om vägförhållanden. SPaT sänds ut av RSU:er och ger status hos trafikljus och när dessa skall ändras. MAP sänds ut av RSU:er för att beskriva layouten hos en korsning. PSM sänds ut av Vulnerable Road User-enheter för att meddela deras närvaro till nalkande fordon. För sensordelning och hantering av låga latenser behövs 5G NR-baserad V2X-funktionalitet.
Testning av fordonssimulering
C-V2X-funktionalitet kan testas genom att simulera olika scenarier i en virtuell miljö där reaktionerna hos TCU:erna (Telematics Control Unit) kan observeras.
Hardware in the Loop (HIL)
Här testas en TCU:s interaktion med en virtuell omgivning bestående av fordonsbaserade system, sensorer och omgivningsinformation, och applikationer som körs på back-end-servrar. TCU:n är vanligtvis ansluten till andra simulerade styrenheter via fordonets kommunikationsbuss samt till en basstation och back-end-server via en trådlös länk.
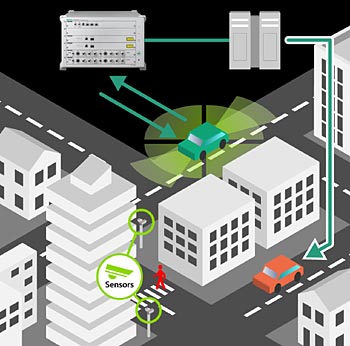
Fig 3: Simulering av Hardware in the Loop (HIL) ger möjligheter att testa en TCU:s samverkan med en virtuell omgivning.
En HIL-uppsättning kan hjälpa till att validera V2I-applikationer på TCU:n under den virtuella testkörningen med olika belastnings- och latensförhållanden, vilket möjliggjorts av den integrerade radionätverkssimulatorn..
C-V2X funktionell testning
Detta simulerar kommunikationsmiljön och testar meddelandeutväxlingen mellan en TCU och andra enheter. Simuleringen gör det möjligt att observera de triggade och utväxlade C-V2X-meddelandena medan fordonet kör på virtuella vägar och interagerar med omgivningen. Vilken information som sänds beror på positioner och aktiviteter hos andra användare av vägen.
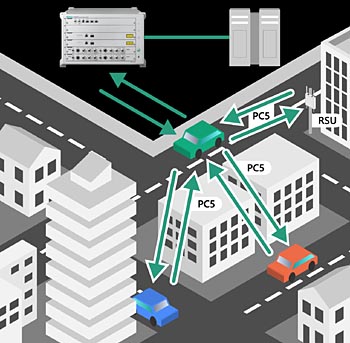
Fig 4: Funktionell C-V2X-testning simulerar utväxlingen av C-V2X-meddelanden mellan en TCU och andra enheter.
TCU:n kommunicerar med andra V2X-enheter med hjälp av PC5-gränssnittet, och med V2N-telematiktjänster via en simulerad mobillänk.
Testlösningen: MT8000A
Anritsu MT8000A är en 5G NR-systemsimulator som stöder radiofrekvens-, protokoll- och funktionell testning. Den stöder frekvenser från under 6 GHz upp till 43 GHz (millimetervåg) med bredbandig signalbehandling och teknologi för lobformning.
Genomströmning, latens och upprepade utsändningar kan utvärderas under olika konfigurationer av PHY/MAC/RLC-skikten. En mjukvarudefinierad arkitektur gör att simulatorn kan byggas ut för att kunna hantera framtida teknologier. Den kan enkelt automatiseras, vilket förenklar integration med andra komponenter i testsystemet.
Slutsats
C-V2X hjälper till att förbättra säkerheten och effektiviteten i transportsystemet. Det finns användningsfall för många verkliga situationer, med scenarier för testning av C-V2X avseende avkänning och beslutsfattande. När C-V2X utvecklas vidare till 5G NR V2X kommer det att finnas möjligheter för än mer avancerade användningsfall och kooperativ autonom körning. Dessa kan effektivt testas i simulerade miljöer, t.ex. i system för Hardware in the Loop och C-V2X Functional Test.
Pavol Polacek, Wireless Speciality, Anritsu
Filed under: Fordonselektronik




