



Öppna garagedörren mjukt
Små AC-induktionsmotorer, för exempelvis öppning av garagedörrar, kan förses med hastighetsstyrning och mjukstart för liten extrakostnad med hjälp av en trefasbaserad växelriktarkrets. Justin Bauer från Microchip tar oss här igenom konstruktionen av en garageportöppnare med en enfas AC-induktionsmotor och en 8-bits enkapseldator.
PSC-(permanent split capacitor)-motorer hör till de enklaste och mest använda för denna typ av tillämpning. De har lågt kraftmoment och låg ström vid start, men kan vara ineffektiva på grund av den opolariserade driftkondensatorn, som ofta fallerar före resten av motorn.
Dessa enfasmotorer kallas ofta tvåfasmotorer, eftersom de inte kan fungera utan tillräckligt fasskifte mellan de båda lindningarna. Kondensatorn är placerad mellan insignalen och lindningen för att ge ett fasskifte på ungefär 90˚.
Switchen ersätts ofta av ett relä som kan styra riktningen genom att alternera vilken fas som leder respektive följer den andra. Kondensatorns värde specificeras normalt av motorns tillverkare och ligger ibland inom området 5 till 50 µF för motorer på mindre än 0,75 kW, av den typ som behandlas här. Man bör vara noga vid valet av kondensator så att man får rätt effektfaktor för maximal verkningsgrad. Fig 1 visar topologin för en traditionell AC-induktionsmotor.
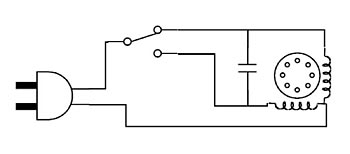
Fig 1. Topologi för en traditionell AC-induktionsmotor; kondensatorn ger det fasskifte som behövs för att generera ett roterande magnetfält
Märkspänningen ligger normalt högt, runt 220 till 450 V, beroende på inspänning. Kondensatorn kan inte vara polariserad eftersom den fungerar över en växelspänning. Om kondensatorn inte fungerar kommer motorn att sluta gå. Det är därför mycket viktigt att välja rätt kondensator.
En praktisk kondensator har motstånd och strålar värme när den förbrukar RMS AC-rippelström inom sitt ekvivalenta seriemotstånd. Den permanent installerade kondensatorns startmoment i stillastående läge avvägs mot rippelbaserad momentreducering när den är igång. På grund av kondensatorns höga märkspänning och märkström väljs den ofta för att tillgodose minsta möjliga startprestanda, vilket resulterar i dålig verkningsgrad i drift.
För motorer som inte har identiska lindningar är det nödvändigt att spänningsmata de båda faserna var för sig. Denna asymmetri beror på kondensatorns närvaro, vilket bildar en resonanskrets med motorns induktans. Därmed höjs spänningen över den ena lindningen vilket orsakar ett ojämnt strömflöde.
En trefasbaserad växelriktare kan dock användas istället för den permanenta kondensatorn, såsom visas i fig 2. Detta gör att motorns hastighet kan justeras med lämplig mängd spänning lagd på vardera lindning så att svagare lindningar inte drivs för mycket.
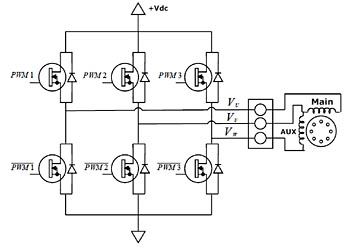
Fig 2. Enfasbaserad växelriktare med tre halvbryggor; sex PWM-signaler utnyttjas för att driva den anslutna “squirrel-cage-baserade PSC-motorn (klicka för större bild)
Motorn kommer fortfarande att rotera utan kondensatorn om spolarna drivs ur fas från varandra. Det går att åstadkomma genom att tre faser skapas i programvara. Denna trefasspänning kan sedan användas som referens för varandra för att skapa två resulterande vågformer över de två motorlindningarna. Den ena fasen tas som referens, eller neutral, för att skapa två vågformer. De tre faserna kan skapas i programvara med hjälp av PWM-tekniker.
Jämförelse
Tre tester kan utföras för att jämföra PSC-driftmetoden med växelriktarmetoden utan driftkondensator. Dessa är: kraftmoment för att bestämma hur drift med varierbar frekvens påverkar motorn; acceleration och hastighet för att identifiera vilken metod som vrider motorns axel snabbast och hur snabbt lasten kommer att accelerera; och verkningsgrad för att jämföra den verkliga delen av uteffekten med ineffekten samt för att mäta effektfaktorn och andra ineffektiva faktorer.
Dessa tre test täcker det mesta som måste övervägas vid konstruktion av motorstyrning. Samtliga tester kan göras utan särskild uppställning. Varje analys i de tre olika testerna kan utnyttja samma uppsättning data. Testuppställningen visas i fig 3.
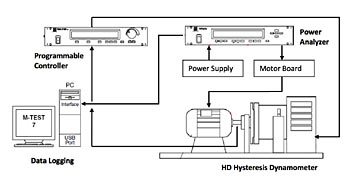
Fig 3. Testuppställning på dynamometer (klicka för större bild)
Testet utnyttjade en 0,19 kW enfasmotor med en balanserad ledningskonfiguration. Båda lindningarna hade identisk resistans och induktans. En halleffektssensor utnyttjades för att mäta axelns hastighet. Matningsspänningen var enfas, tvåtrådig 220 V vid 60 Hz. Utgången matades in i de två terminalerna på växelriktaren.
PC-gränssnittet körde Magtrols M-Test 7 programvara. Den programmerbara styrkretsen kopplade testuppställningen från denna programvara till dynamometern och avläste pålagt kraftmoment. Kraftanalysatorn utförde och loggade alla övriga mätvärden.
Utifrån kraftmomenttestet var det uppenbart att motorn hade högst startmoment på runt 0,75 Nm mellan 50 och 60 Hz i linje med motorkonstruktionen. Frekvenser över och under 60 Hz hade lägre kraftmomentprofiler. De låga frekvensvärdena gav dock inte en konstant kurva för kraftmomentet. Frekvenser under 60 Hz krävde finavstämning av förhållandet mellan spänning och frekvens på grund av förluster i motorn och onoggrannheter i motordriften. Frekvenser under 60 Hz hölls vid maximal spänning.
En låg frekvens orsakar en minskning av impedansen hos en induktans. Den höga spänningen som lades på denna sänkta impedans höjer strömmen i statorn, vilket ger högre kraftmoment. Finavstämning krävs för att göra kraftmomentkurvan linjär.
Kurvornas form varierar kraftigt mellan de två metoderna. Kondensatormetoden uppvisar något större startmoment och accelererar snabbare än växelriktarkortet vid 60 Hz. Växelriktarkortet ger en kurva som liknar den för en motor med D-klassad konstruktion, medan PSCns drifttopologi ger en kraftmomentkurva som liknar klass A. Olika spänningsstorlek orsakad av den permanenta kondensatorn skapar olika stor magnetisk flödestäthet inom statorn. Växelriktarkortet försöker skapa lika mängd ström i båda lindningarna, eftersom denna motor har identisk impedans i båda. Kraftmomentkurvorna har olika form på grund av att drivteknikerna skiljer sig åt på detta sätt.
Om man tittar på startmomentet när rotorn är låst skulle växelriktaren inte kunna lyfta en lika stor last som PSC-metoden om växelriktaren var programmerad att bara köra motorn vid en moduleringsfrekvens på 60 Hz. Växelriktaren kan dock utnyttja drift med varierbar frekvens för att lyfta en ännu större last. Konstruktören måste också ta hänsyn till avvägningarna mellan stort startmoment samt verkningsgrad och hastighet.
Den mest uppenbara fördelen med att styra spänningen och frekvensen är att konstruktören kan styra den hastighet vid vilken motorns axel roterar. Ju snabbare den roterar desto snabbare kan lasten tryckas eller dras till sin destination. Detta kan vara en kritisk konstruktionsvinst i tillämpningar för garagedörr- eller grindsystem.
Växelriktarkort
Växelriktarkortet gör alltså att motorn kan gå snabbare än en liknande motor som drivs med PSC-metoden. PSC-metoden kan bara drivas vid en frekvens och kan därmed inte överträffa sin synkrona hastighet.
Växelriktarkortet kan utformas som en applikationsspecifik plattform snarare än ett universellt demokort. Det ger dock ett antal ingångar och utgångar (I/O) för användaren att utnyttja och modifiera. Växelriktaren är gjord för att driva en enfas- eller trefasbaserad AC-induktionsmotor. En översikt över kortet med en PIC16F1509-styrkrets från Microchip visas i fig 4.
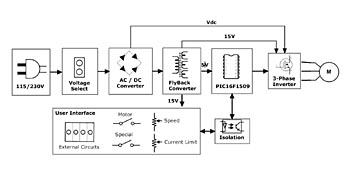
Fig 4. Översikt över hela systemet (klicka för större bild)
Kortet utformades med tanke på flexibilitet, så vissa av dess funktioner kan antingen användas eller inte för att åstadkomma optimering. Flertalet I/O används av den förinställda koden men det finns fortfarande ordentligt med utrymme för utvecklaren att utnyttja specialanpassade modifieringar. I2C-linjerna är också tillgängliga för eventuell ytterligare slavutrustning.
En del I/O-signaler är multiplexerade på ett ben för att öka det antal I/O som kan utnyttjas. Samtliga behov för användargränssnitt är isolerade via två fyrkanaliga optokopplare och en enkanalig optokopplare.
Kortet har två switchknappar och två potentiometrar. Två huvuden finns också för anslutningar för externa I/O, såsom utlösningssensorer för garagedörrar. De två potentiometrarna har sina transistorer i optokopplarkretsen förspänd i sitt förstärkningsområde. Utgången är därför ungefär linjär eftersom optokopplarens LED inte har en linjär I-V-kurva. Stora strömmar i 30 mA området förbrukas för varje potentiometer.
De digitala tryckknapparna och reservingångarna är förspända för att ge ett avbrott vid förändring (IoC, interrupt-on-change) när någon av dem används. Det gör att CPUn slipper att ständigt kontrollera spänningsnivån på benen. När en IoC detekteras måste en ADC-avläsning göras för att avgöra vilken ingång som orsakade avbrottet.
Drift
Motorn är i sitt overksamma läge när PIC16F1509-styrkretsen startar ben och stoppar motorn. När man trycker på startknappen startar motorn med en mjukstartmetod som innebär att frekvensen och spänningen justeras på ett linjärt sätt så att motorn sakta når sin drifthastighet. Motorn övergår sedan till sitt driftläge när mjukstarten är klar.
Motorns utlösningspunkter för hastighet och ström kontrolleras hela tiden i huvudslingan. Om överström detekteras stoppas motorn och status-LEDer blinkar för att indikera ett fel. Motorn stoppas normalt av att tryckknappen utnyttjar antingen inbromsning eller mjukstopp för att återgå till sitt overksamma läge.
Slutsats
AC-induktionsmotorer såsom de som används i garagedörrtillämpningar kan drivas med ett växelriktarkort snarare än en traditionell kondensator. Detta gör att funktioner för hastighetsstyrning och mjukstart kan tilläggas motorn för en relativt låg kostnad. Växelriktarkortet är baserat runt en 8-bitars PIC16F1509-styrkrets från Microchip.
Justin Bauer, Microchip
Filed under: Embedded




