



Beräkna mätosäkerheten vid toppeffekt
Att mäta toppeffekten för en radiosignal innebär att man måste vara vaksam mot flera osäkerhetsfaktorer. Sook Hua Wong, som arbetar med produktplanering inom Agilent Technologies Inc, förklarar var och hur osäkra mätningar kan uppstå . Hon inleder med en kort beskrivning av tekniker för att mäta toppeffekt och ger också en bakgrund till osäkerheter vid mätning av medeleffekt.
De främsta användningsområdena för en RF-effektmeter är att säkerställa noggranna, absoluta mätningar av RF-effektförstärkare och lägga spårbarhet till ett testsystem . Oavsett om det är en testuppställning i en produktionslina eller på en testbänk för felsökning , eller mätningar i fält av radar och mobilkommunikation , förblir effektmetern den referensutrustning som kan säkerställa spårbarhet till internationella standardlaboratorier. Avsikten är att att säkerställa att effektmätningar kan dupliceras vid olika tidpunkter och på olika platser.
Även om effektmetrar anses vara den mest exakta utrustningen för effektmätning , kan mätosäkerheter fortfarande förekomma när man använder dessa instrument . Många tillverkare av effektmetrar publicerar vetenskapliga rapporter, artiklar eller verktyg för att hjälpa användarna att analysera mätosäkerheter, men dess är ofta begränsade till i mätningar av medeleffekt.
Den här artikeln förklarar mätosäkerheter vid mätning av toppeffekt . En kort introduktion av tekniken toppeffekt och medeleffekt, och osäkerheter i samband med mättekniken, ges också som bakgrund för att öka användarens förståelse .
Mätvärdesinsamling
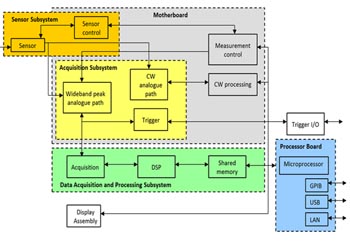
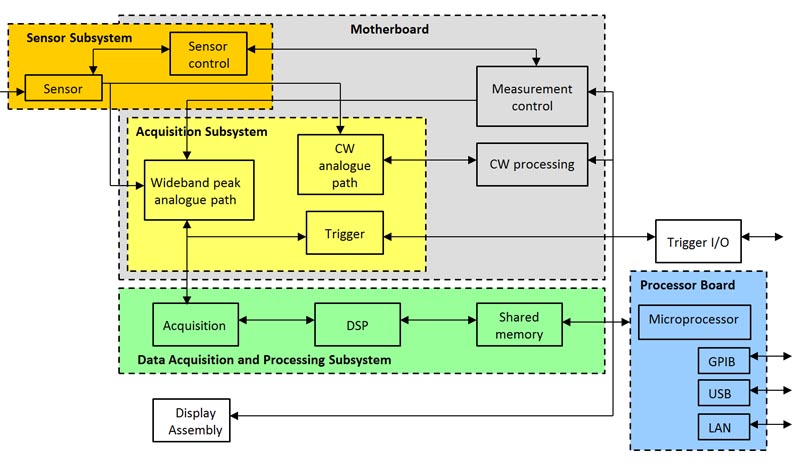
Fig 1. Typisk blockschema för en topp -och medeleffektmeter. (Klicka här för större bild)
Ingångsdelen till en effektmeter består av ett sensorelement. Vanligast är diodsensorn. Sensorn omvandlar en uppmätt signal från effekt till volt.
Vid delsystemet för datainsamling kommer den analoga spänningssignalen att filtreras, samplas och omvandlas från analogt till digitalt format . Utgången är en digital representation av den inmatade analoga signalen.
Det finns två vägar i delsystem för datainsamling : en högpresterande mätning enbart för CW (och genomsnittlig ) och en för bredbandiga toppmätningar .
Signalvägen för den bredbandiga toppsignalen består av precisionsförstärkare med hög bandbredd och en digitaliserare med stort dynamiskt omfång . Signalens envelop följs av sensorn och samplas av ett kontinuerligt klockad A/D-omvandlare på hög hastighet (typiskt 80 MHz eller mer ) .
Sammantaget får man en realtidssamplad version av envelopen för testsignalens effekt. För att känna av signaler med hög dynamik och med hög noggrannhet används vanligen två parallella A/D-omvandlare . För- och eftertriggade sampel samlas in och lagras . Triggermotorn bestämmer tidpunkten för insamling av mätdata. När dessa är insamlade kommer alla sampel att överföras från insamlingsminnet till DSP, som utför korrigering och bearbetar mätdata . De okorrigerade , digitaliserade mätningarna från insamlingsblocket kommer att behandlas av DSP och firmware på ett antal olika sätt : zero / kalibrering korrigering , områdes- och bandbreddskorrigering eller bearbetning av mätdata (topp , medelvärde , CCDF , spår ).
För den analoga signalvägen för CW fungerar effektmetern på samma sätt som den traditionella medelvärdesvisande effektmetern och en ny mätning genomförs efter en integreringsperiod på minst en ”chop”-cykel. Mätningar filtreras för att minska brus och ge en acceptabelt snabb mätuppdatering av 20/40/400 eller fler avläsningar per sekund .
En termistor är också inbyggd i sensorn. Det mäter temperaturen av detektorn och det krävs för att utföra temperatur- baserade linjäritet korrigeringar .
Osäkerhet i medelvärdesmätning
I effektmätningar , som i alla mätningar , finns det många källor till osäkerheter eller fel . I allmänhet finns det tre stora källor till osäkerheter , nämligen missanpassning mellan sensor och signalkälla .
* Missanpassning leder vanligen till det största felet, vilket orsakas av addition och subtraktion av infallande och reflekterade vågor som skapar ett ståendevågmönster på transmissionsledningen . Det resulterar i att en effekten aldrig når fram till sensorn , vilket innebär att det inte kan mätas.
* Den näst största felkälla är de osäkerheter som är förknippade med effektsensorn . Inte all den effekt som når avkänningselementet kommer att mätas . Viss effekt kommer att försvinna inom andra delar av sensorn . Sensorn mäter bara den effekt som avges i sensorn . En kalibreringsfaktor används för att korrigera för bristande verkningsgrad i sensorn .
* Den tredje är fel som uppstår i medeffektmeterns elektronik, såsom onoggrann kalibratorkälla och osäker förstärkning i förstärkare och olinjära kretsar. Med introduktionen av USB-effektsensorer har denna källa till osäkerhet eliminerats och betraktas som en del av sensorns onoggrannhet i kalbreringsspecifikationen som kombinerar linjäritet , osäkerhet i kalibreringsfaktorer, temperaturspecifikationer och osäkerhetsfaktorer i samband med interna kalibrering processer .
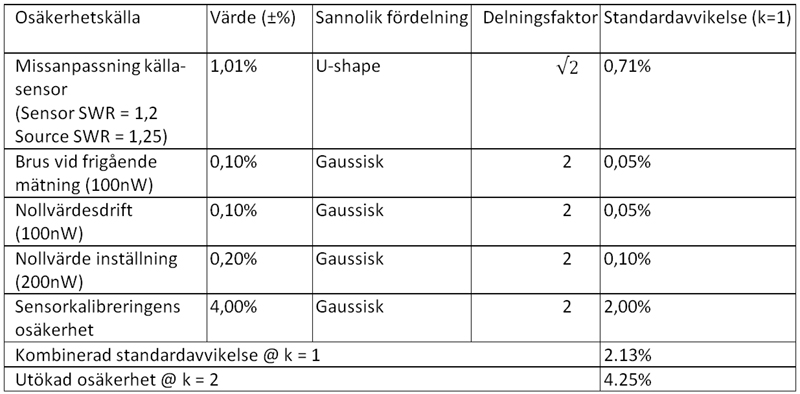
Vid låga signalnivåmätningar tillkommer fler källor till osäkerhet såsom inställning av nollpunkt , drift kring nollpunkten och mätbrus . Dessa fel kan analyseras och kombineras med metoden GUM ( Guide till Expression of Uncertainty in Measurement ) för att ge den övergripande osäkerheten i mätningar ( se tabell 1 ) . Den GUM-metoden har antagits av alla större nationella mätinstitutioner och standard laboratorier .
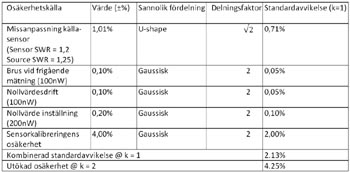
Tabell 1. Beräkning av mätningens osäkerhet för USB-effektsensorn Agilent U2021XA, för toppvärde och medelvärde, vid -10 dBm och 1 GHz när mätningen genomförs som en kontinuerlig medelvärdesmätning av effekt.(Klicka här för större bild)
Osäkerheter vid toppeffekt
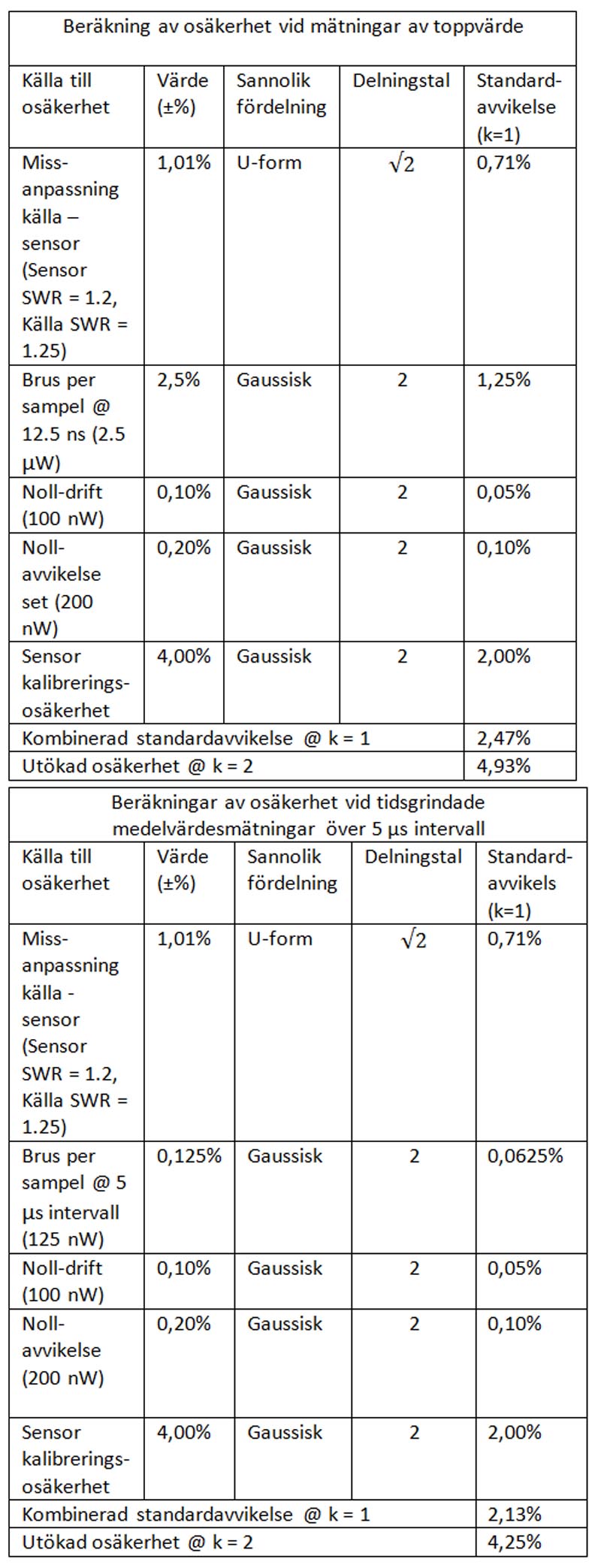
Toppeffekten är i huvudsak genomsnittseffekten under en kort tidsperiod. Beräkning av mätosäkerhet, ovan, gäller för både topp- och medeleffekt . Den största skillnaden är bruset. Eftersom man i huvudsak bara tittat på ett sampel i toppeffektmätningar, bör man använda värdet för " brus per sample " enligt specifikationen . Om man mäter medeleffekt under en viss tidsperiod ( tids-grindad ) , kan man beräkna bruset under tidsperioden. Bruset kommer gradvis att minska när man mäter över en längre period på grund av en medelvärdesbildad effekt.

För en effektmeter med ett samplingsintervall på 12,5 ns och brus per sample specificerat till 2,5 pW är bruset över 5 µs perioden 125 nW .
För toppeffekt under samma period , kan man helt enkelt använda bruset per sample , vilket i detta fall är 2,5 pW .
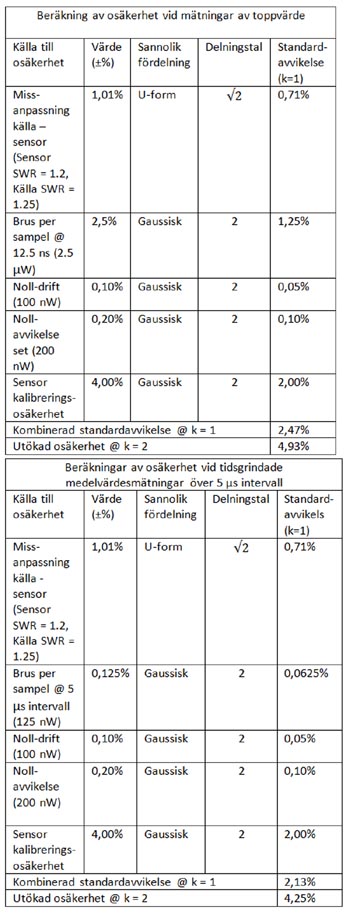
Tabell 2. Mätosäkerhet för en Agilent U2021XA topp- och medelvärdesvisande USB-effektsensor vid -10 dBm och 1 GHz under en tids-grindad medelvärdes- och toppeffektmätning.(Klicka här för större bild)
Slutsats
RF-effektmeter och sensorer är viktig utrustning som används för att lägga till spårbarhet till testsystemet och för att göra korrekta, absoluta mätningar av RF-effekt . De metoder som används för att beräkna osäkerheten i effektmetrar och sensorer är väl etablerade och bygger vanligen på GUM-metoden . Denna metod kan användas både för medeleffekt- och toppeffektmätningar. Den största skillnaden handlar om brus. I medelvärdesmätningar är mätbruset kontinuerligt medan bruset specificeras per sample i topp-effektmätningar eller grindade medelvärdesmätningar.
Agilent erbjuder ett brett utbud av topp -och medeleffektmetrar och sensorer . Osäkerheterskalkyler finns att tillgå för alla Agilents effektmetrar och sensorer, och kan laddas ner från www.agilent.com / hitta / uncertainty_calculators
Filed under: Mikrovag





{kind=link}
{kind=link}
{kind=link}