



Automatiserad signalanalys snabbar upp utvecklingen av radar i bilar
Radar i fordon blir allt vanligare tack vare att tekniken har utvecklats mot prisvänligare lösningar. R&S®FSW spektrumanalysator från Rohde & Schwarz kan användas för att karaktärisera radarsignaler upp till 67 GHz och ta hänsyn till alla relevanta kriterier. Det finns också en option för att testa WLAN 802.11p signaler för Car-To-Car kommunikation.
För att minska antalet olyckor utrustas bilar allt oftare med teknik som hjälper föraren i kritiska situationer. Förutom kameror och ultraljudsensorer använder fordonsindustrin allt mer radarteknik eftersom kostnaderna inom det området sjunker. Med hjälp av radar kan man samtidigt, snabbt och entydigt bestämma hastighet och avstånd till flera olika objekt, oavsett väderlek. Det öppnar för lösningar för automatisk körning.
Radarsignalerna är i det här fallet frekvensmodulerade och kan analyseras med hjälp av spektrumanalysatorer. De som utvecklar radarkomponenterna kan detektera, mäta och visa upp signalerna både i tids- och frekvensdomän i ett frekvensområde ända upp till 500 GHz.
Enligt en studie gjord av Audi Accident Research Unit, beror mer än 90 procent av alla trafikolyckor på den mänskliga faktorn. Olyckstalen skulle därför kunna minskas drastiskt om man införde automatisk körning (liknande autopilotsystemen som finns i flygplan).
Även om detta kan låta som något från en science fiction-roman, så är redan automatiska körfunktioner en realitet i många bilar i lyxklass och nu alltmer även i mellanklass.
Förutom den nu klassiska parkeringsassistansen finns det nu andra hjälpfunktioner för den dagliga bilkörningen – för filbyte, detektering i ”döda vinkeln” och adaptiva farthållare. Medan parkeringsassistansen baseras på klara ja/nej-scenarion, där informationen är i fokus, kan den adaptiva farthållaren ha funktioner som anpassar bilens hastighet i förhållande i fordonet framför.
Att hålla uppe flödet i trafiken
En annan anledning till att automatisk körning har blivit ett så viktigt område är den snabba utvecklingen av megastäder. International Energy Agency har påpekat att städer som Moskva, Shanghai, Tokyo och Mexico City med 20 eller ända upp till 30 miljoner invånare har en kraftig ökning av antalet motorfordon. Det finns idag redan mer än en miljard motorfordon i världen. År 2025 räknar man med att siffran kommer att ha stigit till 1,5 miljarder fordon, varav 400 miljoner enbart i Kina och detta koncentrerat till storstadsområdena. Under de förutsättningarna är automatisk körning inte längre bara en fråga om trafiksäkerhet och bekvämlighet, utan snarare en grundförutsättning för att över huvud taget kunna hålla uppe trafikflödet i städer där medelhastigheten redan idag är lägre än 20 km/t på grund av den stora trängseln på vägarna.
Radarteknologi för fordonsapplikationer
Radarteknologi för bilar skiljer sig på många sätt från de militära applikationer där radar först utvecklades. Först och främst är fordonsindustrin utsatt för en mycket stark prispress, så komponenterna måste vara mycket prisvärda. Dessutom måste sensorerna, på grund av det begränsade utrymmet bakom plasten på stötfångarna, vara extremt små.
Jämfört med kameror och ultraljudssensorer har radar en stor fördel, det behövs inte visuell kontakt mellan radarsensorn och objektet som skall detekteras. Detta sparar kostnader vid produktion av stötfångarna och är också en fördel när det gäller bilens design. Det är emellertid fortfarande en utmaning att kompensera för dämpningen av de utsända och de mottagna signalerna när de passerar genom de olika lagren i stötfångaren och genom färgen som kan vara av metallictyp. Denna kompensering görs i signalbehandlingsprocessen i radarsensorn.
24 och 77 GHz idag
För fordonsapplikationer kan biltillverkarna idag använda fyra frekvensband vid 24 GHz och 77 GHz med olika bandbredder. Medan ISM bandet på 24 GHz har en maximal bandbredd av 250 MHz, kan 24 GHz UWB (Ultra-wide band) erbjuda upp till 5 GHz bandbredd. Det gäller dock barat fram till slutet av år 2022 enligt internationella överenskommelser. Det band som kommer att finnas tillgängligt efter det datumet med upp till 4 GHz bandbredd ligger mellan 77 och 81 GHz. Det används redan för framåtblickande applikationer.
Eftersom signalbandbredden bestämmer upplösningen när det gäller avstånd så är den väldigt viktig i radarapplikationer. Därför är de andra frekvenserna som är allokerade för den här sortens applikationer, 122 GHz och 244 GHz, med en bandbredd av bar 1 GHz inte särskilt användbara för fordonsindustrin. Frekvenserna används tills vidare bara för forskningsprojekt.
Hastighet plus avstånd
När det gäller radarsignaler i den här typen av applikationer vill utvecklarna normalt bestämma både hastigheten hos och avståndet till flera olika föremål under en och samma mätcykel. En sådan uppgift klarar emellertid inte en ordinär pulsradar utan vidare. På basis av tidsskillnaden mellan utsänd och mottagen signal under en cykel kan enbart avståndet detekteras.
För att dessutom bestämma hastigheten använder man en frekvensmodulerad signal, till exempel en linjärt frekvensmodulerad CW-signal (LFMCW: Linear Frequency Modulated Continous Wave).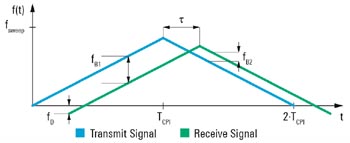
Komponenterna hos en LFMCW-radarsignal.
Frekvensskillnaden mellan den utsända och den mottagna signalen kallar man också beat-frekvens. Den har en Doppler-frekvenskomponent fD och en fördröjningskomponent fT. Doppler-komponenten innehåller information om hastigheten och fördröjningskomponenten innehåller information om avståndet.
Denna ekvation har två okända parametrar, avståndet R och hastigheten vr, och två beat-frekvensmätningar krävs för att bestämma dessa båda parametrar. Omedelbart efter den första signalen lägger man in en andra signal med linjärt ändrad frekvens i mätningen.
Men om det finns flera mål är det inte längre möjligt att entydigt bestämma beat-frekvensparen för flera snabba frekvensändringar (så kallade ”chirps”). Då skapas ”spökobjekt” som inte existerar i verkligheten.
Problemet kan lösas genom att man använder flera olika sändarsignaler med olika hastighet på frekvensändringarna (chirp rate), men det ökar den nödvändiga mättiden.
Det är möjligt att bestämma båda parametrarna inom en mätcykel om man använder FM chirp-sekvenser.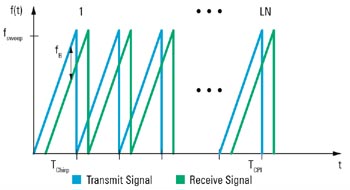
Hastighet och avstånd kan bestämmas inom en enda mätcykel om man använder FM chirp sekvenser.
Eftersom en enskild chirp är väldigt kort jämfört med den totala mätcykeln, bestäms beat-frekvensen primärt av fördröjningskomponenten fT. På så sätt kan avståndet bestämmas direkt efter varje chirp. Dopplerfrekvensen försummas till att börja med.
Om man emellertid bestämmer fasskiftet mellan flera på varandra följande chirps i en sekvens, så kan man bestämma Dopplerfrekvensen med hjälp av Fouriertransformation och på så sätt beräkna hastigheten hos fordonen framför. Man får bättre upplösning på hastigheten om man ökar längden på mätcykeln. Denna komplexa process kräver radarkomponenter med de bästa tillgängliga kretsarna och avancerade signalprocessorer med mycket processorkraft.
Karaktärisering av radarsignalen
Ingenjörer som arbetar med att utveckla radarsensorer med LFMCW-signaler har en stor utmaning: Varje avvikelse från den ideala sändarsignalen ger upphov till mätfel både när det gäller hastighet och avstånd. Speciellt i säkerhetsrelaterade applikationer kan detta få förödande konsekvenser. Viktiga parametrar som frekvenslinjäritet hos en chirp, dess längd och dess reproducerbarhet inom en chirpsekvens måste verifieras ordentligt. *
Signaler av den här typen med snabbt ändrande frekvenser och stor bandbredd kan karaktäriseras med hjälp av en signalanalysteknik i tidsdomän som kallas transientanalys.
En spektrumanalysator som R&S®FSW från Rohde & Schwarz är lämplig att använda i den här applikationen. Det finns en option till det här instrumentet utvecklat just för transientanalys för radarapplikationer. Optionen gör det möjligt att automatiskt detektera och analysera linjära FM-chirp-sekvenser.
Viktiga chirp-parametrar som stigning (chirp rate), sändarens aktiva tid (chirp lenght) och olinjäritet (chirp rate deviation) presenteras i en resultattabell och eliminerar behovet av manuell analys med markörfunktionerna. Kärnan i denna procedur är den I/Q-baserade dataanalysen. Genom att registrera och spara alla I/Q-data är det möjligt att bestämma ett analysområde som bygger på frekvens, mätbandbredd och registreringstid. Resultatet kan visas grafiskt, vilket gör analysprocessen mer effektiv och det blir en tydligare presentation. Storleken hos detta område bestämmer hur många chirps som sedan mäts och avvikelserna i chirp rate relativt en ideal chirp presenteras i en resultattabell.
Den maximala mättiden minskar om man väljer en större mätbandbredd. En ideal chirp av den här typen fastställs genom att man mäter genomsnittlig chirp-rate och effekten.
Analysen av radarsignalerna börjar under mätprocessen eftersom I/Q-data registreras asynkront och utvärderas. På det här sättet minskas löptiden för analysen märkbart, speciellt när man arbetar med signaler med stor bandbredd eller då man har långa mättider. Det finns många olika val när det gäller hur mätresultaten skall presenteras (till exempel RF spektrum, amplitud-, frekvens- eller fasmodulation över tid) och dessa kan visas simultant om så önskas. Spektrumanalysatorn kan visa upp allt från minnet, ett användardefinierat intervall eller enskilda chirp.
FM-linjäritet
För karaktärisering av FM chirp är FM linjäriteten mycket viktig eftersom den påverkar noggrannheten hos objektets parametrar. Detta kan presenteras särskilt bra om man använder spektrogramläget, som avbildar hur signalens spektrum ändrar sig över tid.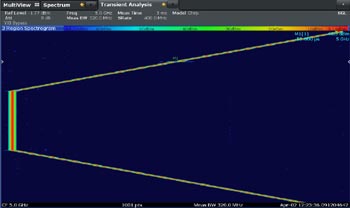
FM linjäritet kan tydligt presenteras med R&S®FSW när man använder spektrogramfunktionen. Alla avvikelser blir tydliga och lätt överblickbara.
Förutom frekvens (x-axeln) och tid (y-axeln), visas signalstyrkan med hjälp av ett färgkodningsschema. Detta ger en god överblick av signalens beteende och möjliggör bedömning av tidsegenskaper även för kortvariga signalstörningar. Om den här sortens störningar uppstår kan andra funktioner användas för mer detaljerad analys.
RF-spektrumdiagrammet, ger till exempel en bild av den uppmätta signalens totala spektrum vid en given tidpunkt. Den visar spektrum inte bara för den önskade signalen utan också av möjliga störningar av denna.
Med ” Frequency Deviation Time Domain” diagrammet kan de på så sätt fastställda frekvensfelen demoduleras och presenteras separat för en komplett chirp. Om man är intresserad av detektera störningar med mycket låg nivå, kan man använda videofilter eller medelvärdesbilda över flera chirp för att minimera eventuellt brus.
Noggrannheten på hastighetsmätningen
En annan viktig parameter i samband med utveckling av radarsensorer är avvikelser från den ideala chirplängden, eftersom det påverkar noggrannheten när det gäller hastighetsmätningar. Därför presenteras mätresultaten i en tabell med starttid och längd för varje chirp tillsammans med parametrarna som nämns ovan. Alla chirp som faller inom ett fördefinierat resultatområde tas då om hand. Varje individuellt chirp kan identifieras med hjälp av en tidsstämpel. Dessutom får varje chirp ett sekvensnummer i en tabell så att de enklare kan hållas isär.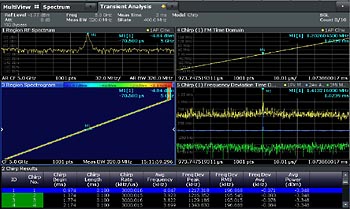
R&S FSW presenterar viktiga chirpparametrar som chirp rate, chirp length och chirp rate deviation i en resultattabell, så att man slipper göra en manuell analys med hjälp av markörerna.
Mätningarna som beskrivs här kan göras utan extra tillbehör med spektrumanalysatorer upp till en frekvens av 67 GHz. I de fall där man behöver göra mätningar på radarsignaler över 67 GHz, måste man använda sig av övertonsblandare för att konvertera insignalen till analysatorns mellanfrekvens (MF). Det är viktigt att analysatorn har högsta möjliga MF, eftersom detta ger ett bredare och entydigt frekvensområde. Detta är speciellt kritiskt när det gäller att analysera bredbandiga signaler som LFMCW signaler.
Radarn får en nyckelroll
Tekniken som beskrivs i denna artikel kan förväntas starkt påverka, kanske till och med att revolutionera, bilkörningen. Radartekniken kommer att fortsätta att ha en nyckelroll i detta.
Efter hand som tekniken utvecklas kommer det att bli möjligt att generera allt mer komplexa signaler med stor bandbredd, som ger allt bättre upplösning och högre säkerhet.
Genom ökningen av antalet sådana signaler, speciellt i korsningar, kommer att det att ställas höga krav på att sensorerna entydigt kan välja ut rätt signaler. Ett möjligt sätt att realisera detta kan vara signalkodning.
Bil-till-bil-kommunikation
På vägen mot automatisk körning kommer kommunikationen mellan bilar C2C (Car-To-Car) att vara ett viktigt komplement. C2C baseras på WLAN standard 802.11p och kommer att ge fordonen möjlighet att kommunicera med varandra och med infrastrukturen runt vägarna. Till exempel kommer vägarbetsområden att göra förarna uppmärksamma om sin existens och trafiksignaler kommer ge information om andra trafiksignaler som de är samordnade med för ”grön våg” för att fordonsdatorn direkt skall kunna använda sig av denna information för att anpassa hastigheten. Det kommer också i fortsättningen att vara så att ny teknik kommer att förändra bilkörningen. En sak kommer dock alltid att vara oförändrad: Du kan köra säkert genom att respektera dina medtrafikanter! 
Christoph Wagner leder affärsutveckling inom marknadsområdet Automotive hos Rohde & Schwarz i München. Han studerade kommunikationsteknik vid Deutsche Telekom Fachhochschule i Berlin och vid Ingenjörshögskolan i Köpenhamn.
R&S FSW spektrumanalysator – fakta i korthet:
* Frekvensområde från 2 Hz till 8/13,6/26,5/43,5/50/67 GHz. Med harmonisk blandare utökas området upp till 500 GHz
* Mellanfrekvens (MF) från 1310 MHz till 1530 MHz (beroende på bandbredd)
* Upp till 500 MHz signalanalysbandbredd
* Lågt fasbrus –137 dBc (1 Hz) vid 10 kHz offset (1 GHz bärvåg)
* Analys av att standard uppfylls för digitala trådlösa kommunikationsstandarder som LTE och IEEE 802.11p (Car-To-Car)
* Flera mätapplikationer kan köras och presenteras parallellt
* Högupplöst 12.1" (31 cm) pekskärm för enkel hantering
Filed under: Fordonselektronik




