



Volvo tar nytt steg mot pilot
Volvo Cars uppger att de nu har en komplett systemlösning på plats, som ska göra det möjligt att integrera självkörande bilar i verklig trafik med vanliga bilförare i förarsätet. Målet är att 100 bilar ska rulla ut i en pilot i Göteborg 2017.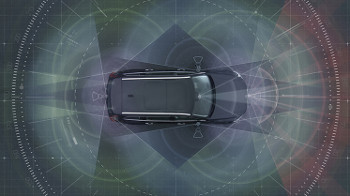
– Vi tar oss in på okänt territorium när det gäller autonom körning. Ett publikt pilotprojekt, med ambitionen att sätta vanliga bilförare bakom ratten på allmänna vägar, har aldrig tidigare genomförts, säger Dr Peter Mertens, Senior Vice President Research and Development på Volvo Car Group.
Volvo tar nu nästa steg mot målet att under 2017 rulla ut 100 självkörande bilar på utvalda gator i Göteborg med kunder i förarsätet. Nyckeln till att det här är möjligt är att företaget nu har utvecklat ett komplext nätverk av sensorer, molnbaserade positioneringssystem och intelligenta broms- och styrtekniker. Autopilotsystem är utvecklat för att klara av alla trafiksituationer när bilen körs i autonomt läge. Den nya tekniken med feltoleranta system är ett stort steg framåt jämfört med tidigare teknik.
– Det är relativt enkelt att konstruera och demonstrera en självkörande konceptbil. Men om du vill skapa effekt på den verkliga marknaden måste du konstruera och tillverka ett komplett system som är säkert, tillförlitligt och prisvärt för kunderna, säger Erik Coelingh, Technical Specialist, Volvo Cars.
Den tuffaste utmaningen uppges vara att utveckla en autopilot som är tillförlitlig såväl i trafiksituationer som vid eventuella tekniska fel. Vi kan inte förvänta oss att föraren är beredd att ingripa i en kritisk situation. Till en början kommer bilarna att köras i autonomt läge endast på lämpliga vägar, där det till exempel inte finns mötande trafik, cyklister eller fotgängare.
Projektet är döpt till Drive Me och några systemdelar som ingår är:
Sensortekniker
Volvo Cars utvecklar en helhetslösning som ger en exakt positionering och en 360°-övervakning runtom bilen. Detta tack vare en kombination av flera radarenheter, kameror och lasersensorer. Ett omfattande system av datorer bearbetar informationen och tar fram en realtidskarta över objekt som rör sig och står stilla i närheten av bilen.
Den exakta positioneringen bygger på den här informationen, GPS-teknik och en högupplöst digital karta i 3D som uppdateras oavbrutet med realtidsdata. Systemet är tillförlitligt och fungerar utan förarens kontroll.
Kombinerad radar och kamera
Kombinationen av en 76 GHz FMCW-radar (frequency-modulated continuous wave) och en kamera i vindrutan är densamma som i nya XC90. Systemet läser av trafikskyltar samt vägens kurvatur och kan upptäcka objekt, såsom andra trafikanter, på vägen.
Radarenheter
Det sitter fyra radarenheter bakom den främre och bakre stötfångaren (en i varje hörn av bilen) som hittar objekt i alla riktningar. Genom att läsa av både till vänster och höger och sända ut vågor som studsar mot skyltar, stolpar och tunnlar ger de en 360°-vy.
360°-vy
Fyra kameror övervakar objekt som är i omedelbar närhet av bilen. Det finns två under ytterbackspeglarna, en vid den bakre stötfångaren och en vid grillen. Förutom att upptäcka objekt på nära avstånd övervakar kamerorna dessutom körfältsmarkeringar. Kamerorna har en stor dynamisk räckvidd och kan hantera mycket snabba ljusförändringar, som när man kör in och ut ur en tunnel.
Laserskanner med flera strålar
Det här sensorsystemet är placerat fram under luftintaget. Skannern kan identifiera objekt framför bilen och säkerställer en mycket hög vinkelupplösning. Den kan även särskilja objekt. Den unika lasersensorn har en räckvidd på 150 meter för fordon och täcker ett 140°-siktfält.
Tre kameror i en
Därtill sitter det en kamera högst upp i vindrutan som ger dels en bred 140°-vy, dels en 45°-vy och dels en lång och smal 34°-vy för djupare avläsning och bättre identifiering av objekt på avstånd. Kameran kan upptäcka fotgängare som plötsligt närmar sig eller andra oväntade trafikfaror.
Radarenheter med lång räckvidd
Två radarenheter med en lång räckvidd är placerade vid den bakre stötfångaren och säkerställer ett bra siktfält bakåt. Det här är särskilt praktiskt vid filbyte, då de kan upptäcka fordon som närmar sig snabbt och långt bakifrån.
Ultraljudssensorer
Tolv ultraljudssensorer sitter runt bilen för att upptäcka objekt på nära avstånd och stödja den autonoma körningen vid låga hastigheter.
Sensorerna bygger på samma teknik som i nuvarande parkeringshjälp men har en avancerad signalbearbetning.
Den här tekniken är effektiv för att till exempel upptäcka oväntade föremål, som fotgängare eller andra hinder på vägen i närheten av bilen.
Högupplöst digital karta i 3D
En digital och högupplöst 3D-karta förser bilen med information om omgivningen, till exempel höjd, vägkurvatur, filantal, tunnelgeometri, skyddsräcken, skyltar och utfarter. Positionsgeometrin anges ofta på centimeternivå.
Avancerad positionering
Den högkvalitativa GPS:en ingår i positioneringssystemet som har förbättrats med en kombination av en avancerad GPS, en accelerometer med tre frihetsgrader och ett gyroskop med tre frihetsgrader. Genom att matcha kartan med sensorernas 360-gradiga bild får bilen information om dess position i förhållande till sin omgivning.
Med information både från sensorerna och kartan kan Drive Me-bilen välja bästa kurs i realtid genom att läsa in vägens kurvatur, hastighetsgräns, tillfälliga skyltar och övrig trafik.
Molntjänster
Molntjänsten är kopplad till trafikverkets trafikcentral. Det säkerställer att bilen alltid har tillgång till den senaste trafikinformationen. Trafikledarna kan också be förarna att stänga av det autonoma läget vid behov.
Filed under: SvenskTeknik




